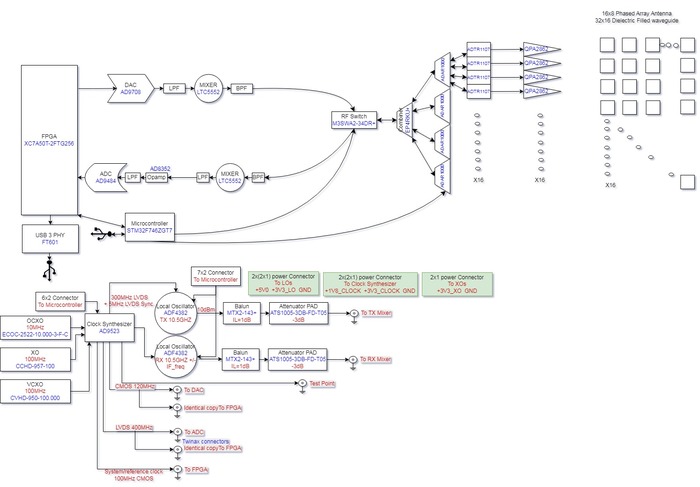
Проект AERIS-10 разработал полностью открытую модульную радиолокационную станцию (радар), которую можно использовать в качестве платформы для проведения экспериментов c фазированными антенными решётками, сжатием импульсов, доплеровской обработкой сигналов и отслеживанием целей. Полные схемы, распайки печатных плат, списки комплектующих (BOM), Gerber-фалы для изготовления плат, макеты для 3D-печати и описания аппаратных блоков на языках Verilog/VHDL распространяются под лицензией CERN-OHL-P (CERN Open Hardware Licence). Код прошивки для микроконтроллера STM32, вспомогательные утилиты на Си и графический интерфейс на Python поставляются под лицензией MIT. Подготовлено два варианта радиолокационной станции на фазированных антенных решётках - AERIS-10N (Nexus) и AERIS-10E (Extended). Оба варианта используют частоту 10.5 ГГц и используют импульсную линейную частотную модуляцию (LFM). Отличия сводятся к мощности излучения (1Wx16 и 10Wx16), а также использованию массива плоскостных антенн 8x16 и массива щелевых излучателей в диэлектрически заполненном волноводе 32x16, обеспечивающих дальность действия до 3 км и 20 км, соответственно. Система модульная с раздельными платами управления питанием, генерации частот и RF-блоками. Для обработки сигналов, сжатия импульсов, вычисления скорости объекта при помощи доплеровского быстрого преобразования Фурье, исключения неподвижных объектов (MTI) и обеспечения постоянного уровня ложных тревог (CFAR) задействован FPGA XC7A100T. Управление работой и настройка периферийных устройств осуществляется при помощи микроконтроллера STM32F746xx.
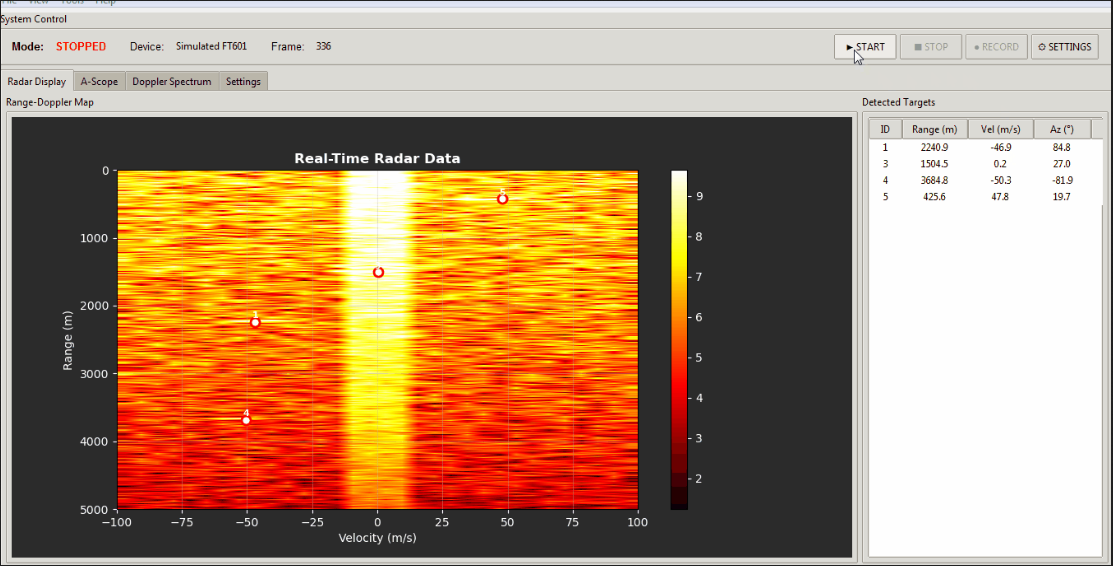
Корректировка положения и ориентации в режиме реального времени обеспечивается при помощи GPS и инерциальных датчиков (акселерометр, гироскоп). Реализовано электронное управление сканирующим лучом в пределах ±45° по высоте и азимуту. Вращение антены на 360° обеспечивает шаговых двигатель. Возможно одновременное отслеживание движения нескольких объектов. Для управления радаром, наглядного отслеживания движущихся объектов и их сопоставления с картой реализован графический интерфейс.
Сборка радара осуществляется из типовых элементов, имеющихся в широкой продаже. Затраты на чипы и компоненты для изготовления радара в простейшей конфигурации оцениваются приблизительно в 5000 долларов. Для сравнения стоимость коммерческих радаров того же класса начинается с 250 тысяч долларов.


Источник: https://www.opennet.ru/opennews/art.shtml?num=64999

Корректировка положения и ориентации в режиме реального времени обеспечивается при помощи GPS и инерциальных датчиков (акселерометр, гироскоп). Реализовано электронное управление сканирующим лучом в пределах ±45° по высоте и азимуту. Вращение антены на 360° обеспечивает шаговых двигатель. Возможно одновременное отслеживание движения нескольких объектов. Для управления радаром, наглядного отслеживания движущихся объектов и их сопоставления с картой реализован графический интерфейс.
Сборка радара осуществляется из типовых элементов, имеющихся в широкой продаже. Затраты на чипы и компоненты для изготовления радара в простейшей конфигурации оцениваются приблизительно в 5000 долларов. Для сравнения стоимость коммерческих радаров того же класса начинается с 250 тысяч долларов.


Источник: https://www.opennet.ru/opennews/art.shtml?num=64999