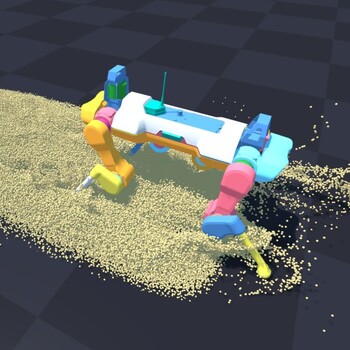
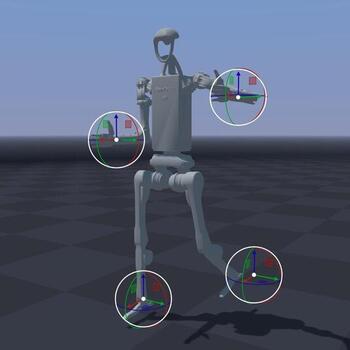
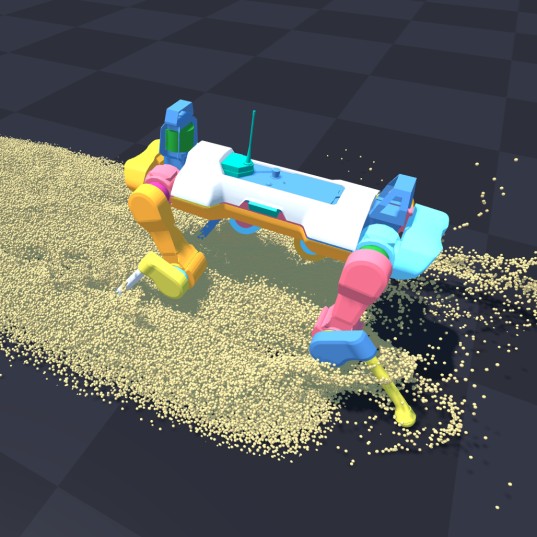
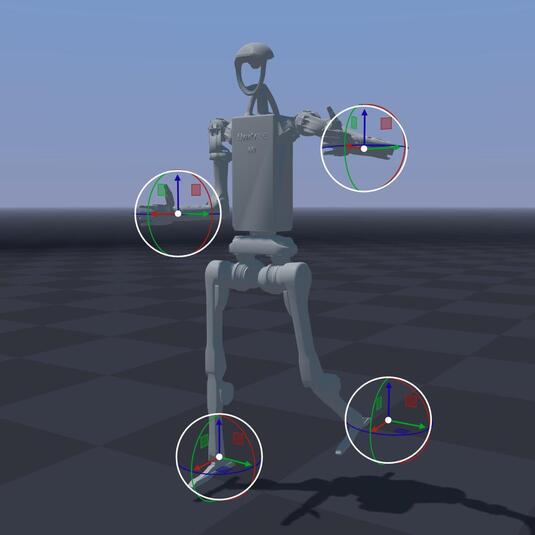
Под покровительство организации Linux Foundation переведён движок симуляции физических процессов Newton, совместно разработанный компаниями NVIDIA, Disney Research и Google DeepMind. Отмечается, что перевод Newton на независимую нейтральную площадку, не контролируемую отдельными компаниями, позволит привлечь к разработке новых участников. К совместной работе над проектом уже подключились компании Lightwheel и Style3D, а также исследователи из Мюнхенского и Пекинского университетов. Код Newton написан на языке Python и распространяется под лицензией Apache 2.0. Движок создан для быстрой и масштабируемой симуляции процессов и проведения исследований в области робототехники. Среди прочего, Newton позволяет симулировать сложное поведение роботов с большим числом взаимодействий, такое как ходьба по снегу или манипуляции с хрупкими объектами. Среди ключевых достоинств проекта отмечено задействование GPU для ускорения операций и быстрой масштабируемой симуляции, а также расширяемая архитектура, позволяющая подключать и заменять компоненты. Для ускорения моделирования процессов и пространственных вычислений с использованием GPU задействован фреймворк NVIDIA Warp, а для переносимого представления иерархически связанных данных, образующих графическую сцену, применена платформа OpenUSD. Для проведения моделирования можно использовать разные бэкенды проведения расчётов физических процессов (solver). В качестве основного бэкенда задействован движок MuJoCo (Multi-Joint dynamics with Contact), а в качестве опций доступны бэкенды, реализующие методы Euler, Featherstone, ImplicitMPM, SemiImplicit, Style3D, VBD и XPBD. Возможна загрузка моделей в форматах URDF, MJCF и USD. Поддерживается дифференцируемая симуляция, позволяющая использовать градиентные методы и вычислять производные от выходных параметров симуляции по отношению к входным параметрам для оптимизации параметров симуляции или применения в машинном обучении. Например, можно использовать движок для оптимизации процессов и обучения роботов точным манипуляциям в симулированной среде. Поддерживается визуализация процесса симуляции в режиме реального времени.


Источник: https://www.opennet.ru/opennews/art.shtml?num=63966

Источник: https://www.opennet.ru/opennews/art.shtml?num=63966